How it is used
![]()
The VRFT algorithm gives solutions to different model reference control problems (see "what it is used for" for more details). For each control problem, the inputs and outputs of the algorithm are different and they are as follows:
Consider the control scheme in figure 1.
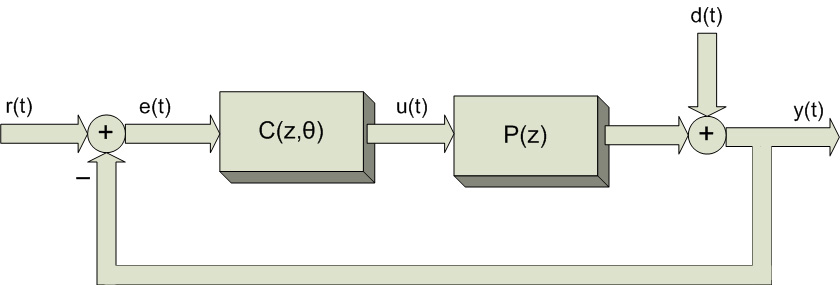
Figure 1: 1 degree of freedom control scheme.
- CONTROL OBJECTIVE:
The control objective is the minimization of the following 2-norm model-reference criterion:
Figure 2: open loop experiment scheme.
When the plant output y(t) is affected by additive noise, such a noise generates bias in the controller parameters. To counteract this biasing effect, an instrumental variable method can be used. There are two different choices for the instrumental variable:
- REPEATED EXPERIMENT: perform a second experiment on the plant using the same input u(t) as in the first experiment and collect the corresponding output y'(t); then, construct the instrumental variable as: ξ(t) = β(z)L(z)(1/M(z) - 1)y'(t);
- IDENTIFICATION OF THE PLANT: identify a model P~(z) of the plant from data and generate the simulated output y~(t) = P~(z)u(t). Then, construct the instrumental variable as: ξ(t) = β(z)L(z)(1/M(z) - 1)y~(t);
2. a reference model Mr(z) that describes the desired transfer function from r(t) to y(t) ;
3. a family of parameterized controllers {C(z,θ)};
4. a user-chosen weighting function W(z) that emphasizes the importance of matching the reference-to-output transfer function with Mr(z) at different frequencies.
- OUTPUT OF THE ALGORITHM:
The controller C(z,θ).
- CONTROL OBJECTIVE:
The control objective is the minimization of the following 2-norm model-reference criterion (see figure 1).
2. a reference model Md(z) that describes the desired transfer function from d(t) to y(t) ;
3. a family of parameterized controllers {C(z,θ)};
4. a user-chosen weighting function W(z) that emphasizes the importance of matching the output-sensitivity with Md(z) at different frequencies.
- OUTPUT OF THE ALGORITHM:
The controller C(z,θ).
- CONTROL OBJECTIVE:
The control objective is the minimization of the following 2-norm model-reference criterion (see figure 1):
3. a reference model Mr(z) that describes the desired transfer function from r(t) to y(t) ;
4. a reference model Mu(z) that describes the desired transfer function from r(t) to u(t) ;
5. a family of parameterized controllers {C(z,θ)};
6. a user-chosen weighting function Wr(z) that emphasizes the importance of matching the reference-to-output transfer function with Mr(z) at different frequencies;
7. a user-chosen weighting function Wu(z) that emphasizes the importance of matching the input-sensitivity with Mu(z) at different frequencies;
8. weights λ1 and λ2 used to give relative importance to the two objectives.
- OUTPUT OF THE ALGORITHM:
The controller C(z,θ).
- CONTROL OBJECTIVE:
The control objective is the minimization of the following 2-norm model-reference criterion (see figure 1):
3. a reference model Md(z) that describes the desired transfer function from d(t) to y(t) ;
4. a reference model Mu(z) that describes the desired transfer function from d(t) to u(t) ;
5. a family of parameterized controllers {C(z,θ)};
6. a user-chosen weighting function Wd(z) that emphasizes the importance of matching the output-sensitivity with Md(z) at different frequencies;
7. a user-chosen weighting function Wu(z) that emphasizes the importance of matching the input-sensitivity with Mu(z) at different frequencies;
8. weights λ1 and λ2 used to give relative importance to the two objectives.
- OUTPUT OF THE ALGORITHM:
The controller C(z,θ).
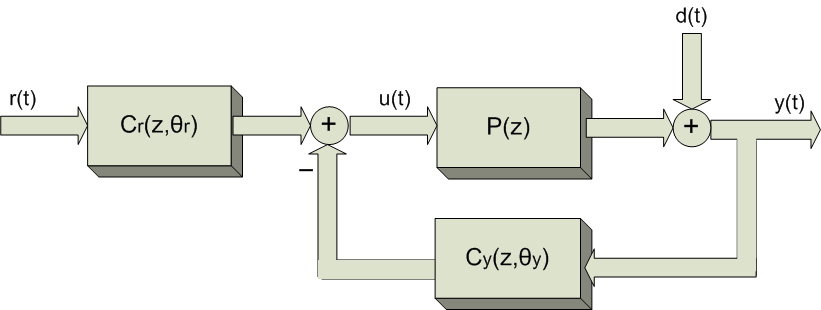
Consider the 2 d.o.f. control scheme in figure 3.
Figure 3: 2 degree of freedom control scheme.
- CONTROL OBJECTIVE:
The control objective is the minimization of the following 2-norm model-reference criterion:
2. a reference model Mr(z) that describes the desired transfer function from r(t) to y(t) ;
3. a reference model Md(z) that describes the desired transfer function from d(t) to y(t) ;
4. a family of parameterized controllers {(Cr(z,θr),Cy(z,θy))};
5. a user-chosen weighting function Wr(z) that emphasizes the importance of matching the reference-to-output transfer function with Mr(z) at different frequencies;
6. a user-chosen weighting function Wy(z) that emphasizes the importance of matching the output-sensitivity with Md(z) at different frequencies.
- OUTPUTS OF THE ALGORITHM:
The controllers Cr(z,θr) and Cy(z,θy).
Go to downloads for software downloading.