How it works
![]()
The Virtual Reference Feedback Tuning is a direct method for the design of feedback controllers when the plant is unknown. It is assumed that the plant is a linear SISO discrete-time dynamical system with transfer function P(z). Such transfer function is unknown and a set of I/O data, collected during an experiment on the plant, is available for design purposes.
In the following, details are given on how the method works for the simplest set-up where one wants to shape the reference-to-output transfer function.
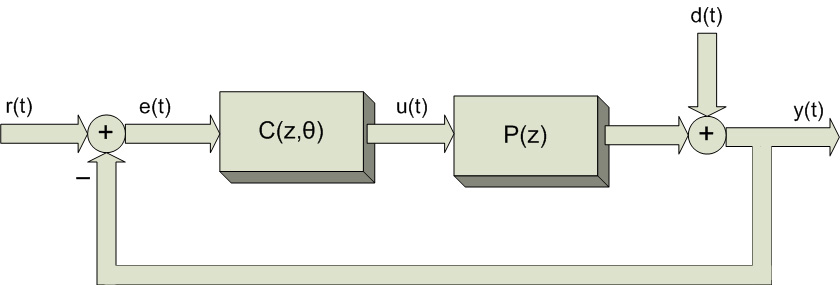
The control specifications are assigned via a reference model Mr(z). This describes the desired r(t) to y(t) transfer function of the closed-loop system (see figure 1). Attention is restricted to linearly parameterized controllers:
where βk(z) are known transfer functions and θk are parameters to be selected.
The control objective is the minimization of the following model-reference criterion:
where W(z) is a weighting function chosen by the user.
Figure 1: 1 degree of freedom control scheme.
The idea behind the VRFT method can be summarized in 4 steps:
Figure 2: open loop experiment scheme.
Go to downloads for software downloading.