What it is used for
![]()
It is common experience in industrial control design that a mathematical description of the plant to be controlled is not available and that undertaking a modelling study is too costly and/or time-consuming. In these cases, one would like to come up with a controller tuned directly from measurements coming from the plant without going through a modelling phase.
The VRFT algorithm permits to tune a controller within a specified class on the basis of a single set of input/output data collected from an experiment on the plant. VRFT was originally introduced for 1 degree of freedom (1 d.o.f) controllers and subsequently extended to 2 d.o.f. controllers. It gives a solution to model reference control problems of the following types:1. Shaping the reference-to-output transfer function (1 d.o.f. controller)
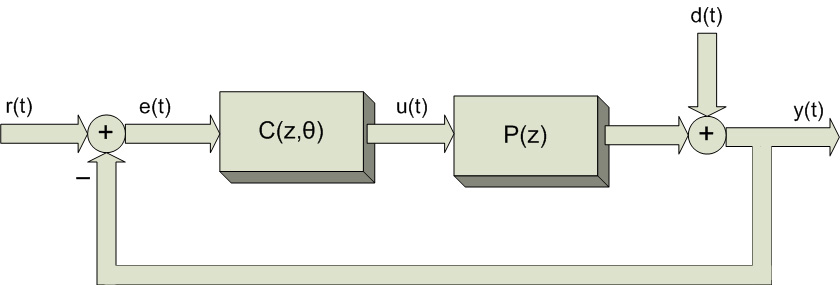
Consider the control scheme in figure 1.
Figure 1: 1 degree of freedom control scheme.Given a reference model Mr(z) that describes the desired transfer function from r(t) to y(t) and a family of parameterized controllers {C(z,θ)}, the control objective is the minimization of the following 2-norm model-reference criterion:
where W(z) is a user-chosen weighting function. VRFT returns the global optimum of J when perfect matching between the reference-to-output transfer function and the reference model is possible, and it returns a good approximation of the best restricted complexity controller when the matching can only be approximately achieved.
2. Shaping the output-sensitivity (1 d.o.f. controller)
Given an output-sensitivity model Md(z) that describes the desired transfer function from d(t) to y(t) (Figure 1), the control objective is the minimization of the following 2-norm model-reference criterion:
3. Shaping the reference-to-output transfer function with input constraints (1 d.o.f. controller)
Given a reference model Mr(z) that describes the desired transfer function from r(t) to y(t) (Figure 1) and an input-sensitivity model Mu(z) that describes the desired transfer function from r(t) to u(t), the control objective is the minimization of the following 2-norm model-reference criterion:
where the two objectives are given relative importance according to the choice of the weights λ1 and λ2.
4. Shaping the output-sensitivity with input constraints (1 d.o.f. controller)
Given an output-sensitivity model Md(z) that describes the desired transfer function from d(t) to y(t) (Figure 1) and an input-sensitivity model Mu(z) that describes the desired transfer function from d(t) to u(t), the control objective is the minimization of the following 2-norm model-reference criterion:
where the two objectives are given relative importance according to the choice of the weights λ1 and λ2.
5. Shaping the reference-to-output transfer function and the output-sensitivity (2 d.o.f. controller)
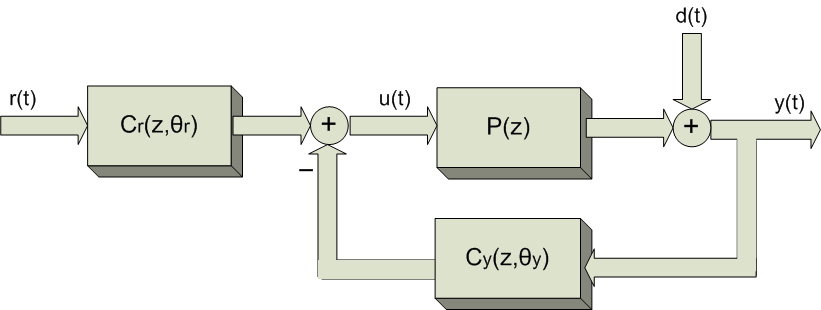
Consider the 2 d.o.f. control scheme in figure 2.
Figure 2: 2 degree of freedom control scheme.
Given a reference model Mr(z) that describes the desired transfer function from r(t) to y(t) and an output-sensitivity model Md(z) that describes the desired transfer function from d(t) to y(t) and a family of parameterized controllers {(Cr(z,θr),Cy(z,θy))}, the control objective is the minimization of the following 2-norm model-reference criterion:
where Wr(z) and Wy(z) are user-chosen weighting functions.
Go to downloads for software downloading.